团队名称:无人系统环境感知与智能控制
团队负责人:吕成兴
团队成员:陈健、王言前、王建华、徐新立、杨智博、
团队简介:团队现有固定成员6人,其中博士6人,副教授4人,讲师2人,硕士研究生20余人。研究方向涉及移动平台的环境感知、自主控制、轨迹跟踪控制、路径规划与学习优化控制、网络控制等移动观测平台核心技术方向。本团队研究方向在智能无人系统移动平台中占居重要地位,是实现移动平台运动稳定工作精准的关键所在。团队将致力于移动平台系统的感知与智能优化控制研究。在学术方面深入探索复杂环境下智能移动平台环境感知、路径规划、轨迹跟踪、能耗优化及组网协同控制等科学问题;在科研方面完成移动平台控制模块的设计、开发与测试任务;在产业方面为自动化和工业机器人领域提供优质的产品及服务。目前团队主要成员在研国家自然科学基金1项,山东省重大1项,山东省自然基金1项,横向委托项目2项。JCR1区论文30余篇,授权专利10余项。
团队主要研究成果:
部分专利和软著:
[1]陈健;雷建和;罗雨童;解静;吕成兴;蒋时雨;一种全自动植树机及植树方法, 2021-03-30,中国, 202110341605 .7.
[2]陈健; 雷建和; 罗雨童; 解静;吕成兴; 蒋时雨; 一种植树机, 2021-11-30, 中国, ZL202120647694. 3.
[3]吕成兴; 赵娜; 刘军礼; 高乾; 刘波; 牟华; 李金萍; 赵阳; 李磊; 周忠海; 周晓晨; 蒋慧略; 惠超; 张照文 ; 一种牵引控制系统的牵引位置校正计算方法, 2015-05-13, 中国, 201310112277.9
[4]吕成兴; 刘军礼; 高乾; 臧鹤超; 李磊; 张风丽; 姚璞玉; 张照文; 周忠海; 华志励; 牟华; 王闻; 刘枫琛; 刘铁生 ; 无人船能量管理方法及系统, 2017-06-05, 中国, 201710415159.3
[5]吕成兴; 赵娜; 高乾; 刘军礼; 刘波; 牟华; 李金萍; 赵阳; 李磊; 周忠海; 周晓晨; 蒋慧略; 惠超; 张照文 ; 牵引控制系统的牵引位置定位计算校正方法, 2015-03-04, 中国, 201310112302.3
[6]吕成兴; 高乾; 牟华; 周忠海; 刘波; 李磊; 惠超; 郝宗睿 ; 用于海水中的多种气体进行浓度检测的 装置, 2017-9-15, 中国, ZL2015101266628
[7]吕成兴; 刘军礼; 高乾; 臧鹤超; 李磊; 张风丽; 姚璞玉; 张照文; 周忠海; 华志励; 牟华; 王闻; 刘枫琛; 刘铁生 ; 一种海洋监测无人船, 2018-03-02, 中国, 201720642326.3
[8]吕成兴; 深海油气及可燃冰探测信号采集处理软件, 2015SR172969, 原始取得, 全部权利, 2015-06- 15
[9]吕成兴; 激光干涉式水听器控制软件, 2012SR085987, 原始取得, 全部权利, 2011-10-25
[10]吕成兴; 海底冷泉声学探测数据处理软件, 2019SR0301734, 原始取得, 全部权利, 2019-01-15
[11]吕成兴;陈健;周玉国;徐新立; 杨智博; 杨玉霞; 吴永玲; 高乾; 吕霞; 赵化民; 余继恒; 董颖慧 ; 基于语义特征聚类的机器人焊接方法及系统, 2022-1-20, WIPO, PCT/CN2021/087431
[12]吕成兴;陈健; 周玉国;徐新立; 杨智博; 杨玉霞; 吴永玲; 高乾; 吕霞; 赵化民; 余继恒; 董颖慧 ; 基于语义特征聚类的机器人焊接方法及系统, 2021-4-16, 中国, 202110407179.2
在研和已完成的项目:
[1]国家重点研发计划,2016YFC1400802,海洋生物化学常规要素在线监测仪器研制及产业化,2016/09-2020.6,830万元,在研,参与。
[2]国家海洋局行业标准,201810041-T,臭氧法海上化学需氧量自动分析仪行业标准,2018.1-2020.5,主持。
[3]山东省重大专项,2015ZDZX08001,极地甲板运输船设计与关键技术研究,2015/08-2017/12,500万元,在研,参与。
[4]科技部国际科技合作项目,2014DFR60490,声学法***声学探测技术***,2014/04-2017/03,384万元,已结题,参与。
[5]科技部国际科技合作项目,2011DFR60810,深海可燃冰******联合研发,2012/04-2015/04,767万元,已结题,参与。
[6]海洋局公益性项目,201005025,海洋生态环境监测仪器产业化及示范应用——COD课题,2010/07-2015/06,135万元,已结题,参与。
[7]科技部863计划,2007AA09210103,臭氧法海水COD自动分析仪,2009/01-2012/12,30万元,已结题,参与。
[8]山东省科技发展计划,2010GHY10515,激光干涉接收式水声定位系统研究,2010.8-2011.12,32万元,已结题,参与。
[9]科技部国际科技合作项目,2008DFR20230,基于***原理的海洋灾害预警系统,2006/08-2010/12,500万元,已结题,参与。
[10]横向项目,轨道试验车牵引控制系统设计,2015/07-2017/07,25.2万元,已结题,主持。
[11]横向项目,西南交通大学“轨道试验车电气牵引控制系统设计”,2011/10-2012/10,121万元,已结题,主持。
[12]横向项目,海上溢油模拟风化实验系统研制,2011.7~2012.7 24.67万元,已结题,主持。
[13]国家自然科学基金青年基金,61803220,几类广义非线性系统的基于观测器的(自适应)模糊输出反馈控制,2019/01-2021/12,25万元,在研,主持。
[14]山东省自然科学基金面上项目,基于iGPS和面结构光的大型钣金件高光表面/快速变形表面的三维测量方法研究,2022/01-2024/12,立项,主持。
[15]陕西省复杂系统控制与智能信息处理重点实验室开放课题,2020CP07,复杂情况下结构光三维测量技术研究,2020/9-2022/8,4万元,在研,主持。
[16]国家粮食和物资储备局软科学课题,主持
[17]教育部产学合作协同育人项目,2万元,主持
[18]2019年度中韩青年科学家交流计划项目,2019.07-2020.06,3000万韩元,主持
[19]青岛市博士后应用基础研究项目,结构振动AMD系统控制策略研究,40100020082,2018-2020,5万元,主持
[20]国家自然科学基金面上项目,61175092,基于智能自适应的SUAV机翼损伤下的重构控制研究与验证,2012/01-2015/12,58万元,参与
[21]国家自然科学基金重点项目子课题,61433016,面向任务的旋翼飞行机械臂自主作业与控制方法,2015/01-2019/12,360万元,参与
[22]“863”计划,集约化水产养殖数字化集成系统研究与应用子课题2007AA10Z238,2007.8—2010.10,200万元,参与
[23]霍英东教育基金会青年教师基金项目,农业病虫害远程诊断技术,94032,2004.01-2006.12,16万元,参与
获奖
[1]张涛,周忠海,吕成兴等,臭氧法海水COD自动分析仪,2010.11,科技成果鉴定,山东省科技厅,第10位
[2]陈健,山东省研究生优秀科技创新成果奖,省级三等奖,2017.10
[3] 陈健,林崇,复杂非线性广义时滞系统的输出反馈控制方法研究,山东省高等学校科学技术优秀成果奖三等奖,2020.
产品介绍及样机示意图:
1.小型水质监测无人船
小型水质监测无人船测量平台是一种智能化、高效率、低成本的水面多功能设备。以近海、港湾、湖泊、河流、水库等水域为对象,可搭载相关水质监测传感器设备,适用于执行重复性、业务化运行任务。
能够进行自主巡航任务或手动遥控操作完成测量任务,监控数据进行本地存储或通过无线通信技术发送到基站。
主要参数:
最大航速 10节
工作航速 6节
满载排水量状态下,工作航速续航时间为3小时。

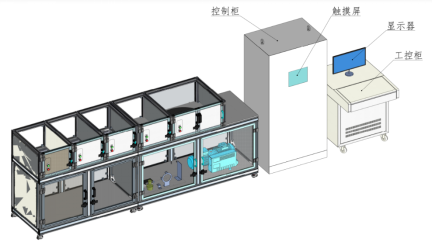
2.高精密气密性测试系统
高精密气密性测试系统,具有一键启动自动检测、实时显示测试件腔内气压值、中途可以停止检测、检测不合格后输出报警、每个工位生成对应的检测报告等功能,保证测试结果准确性和测试效率。
2.1 压力(真空)范围:
绝对压力峰值达到1000Pa,相对压力峰值达到-0.99×105 Pa~-0.95×105Pa。
2.2 检测精度
检测误差小于等于100Pa。
2.3 保压时间
保压时间0-99h(用户设定),绝对压力峰值1×103 Pa~5×103 Pa(用户设定),
压力变化1×103~1×105 Pa(用户设定),充气速率(用户设定)。
2.4 实时监测功能
每个工位集中显示在触摸屏和电脑显示器上。
2.5 自动化程度
一键启动自动检测,实时显示测试件腔内气压值;中途可以停止检测,检测不合格后输出报警。
2.6 可同时检测最大工位数量
可同时检测最大工位数量为5。
2.7 检测功能
每个工位生成对应的检测报告,检测报告中体现工位号、产品编号、每分钟的对应的压力值、压力随时间变化曲线。
2.8 洁净程度
不能产生油污或水汽。
2.9 安全性
每个检测工位配备防破碎、防倾倒装置。
2.10 适用范围
4 个工位能适应直径300mm产品的测试,1个工位能适应直径580mm产品的测试要求,安装方便、密封可靠。
2.11其他
可自动生成检测报告,连接打印机,可手动打印报告。
3.大型立面维护智能作业机器人
该智能作业机器人系统满足船舶及海工装备外表面清洁、除锈、喷漆、检测及废弃物回收等作业的效率、质量要求,完成传统行业关键工艺流程再造,助力相关工业转型升级和智能制造。

代表性论文
[1] Chengxing Lv; Haisheng Yu; Jireru Chi; Tao Xu; Hechao Zang; Huilue Jiang; Zhaowen Zhang; A hybrid coordination controller for speed and heading control of underactuated unmanned surface vehicles system,Ocean Engineering, 2019, 176, 222-230.
[2]Chengxing Lv; Haisheng Yu; Na Zhao; Jieru Chi; Hailin Liu; Lei Li; Robust state-error port-controlled Hamiltonian trajectory tracking control for unmanned surface vehicle with disturbance uncertainties,Asian Journal of Control, 2020.
[3]吕成兴;于海生;周忠海;臧鹤超;张风丽;张照文;端口受控哈密顿方法的电力双推进无人船航向航速控制,海洋科学, 2018, (01): 134-138.
[4]Chengxing Lv; Haisheng Yu;Jian Chen; Na Zhao; Jieru Chi ; Trajectory tracking control for unmanned surface vessel with input saturation and disturbances via robust state error IDA-PBC approach,Journal of the Franklin Institute, 2022.
[5]Jian Chen;Jinpeng Yu; Hak-Keung Lam; New Admissibility and Admissibilization Criteria for Nonlinear Discrete-Time Singular Systems by Switched Fuzzy Models,IEEE Transactions on Cybernetics.DOI: 10.1109/TCYB.2021.3057127
[6]Jian Chen;Jinpeng Yu; Hak-Keung Lam; Adaptive fuzzy tracking control for a class of singular systems via output feedback scheme,IEEE Transactions on Fuzzy Systems.DOI:10.1109/TFUZZ.2020.3042615
[7]Jian Chen; Chong Lin; Bing Chen; Ziye Zhang;Observer-based adaptive neural control for a class of nonlinear singular systems,International Journal of Robust and Nonlinear Control,2020, 30:4043-4058.
[8]Jian Chen;Jinpeng Yu; Robust Control for Discrete-Time T-S Fuzzy Singular Systems,Journal of Systems Science & Complexity,2021, 34(4):1345-1363.
[9]Jian Chen;Chong Lin; Bing Chen; Qing-Guo Wang; Regularization and stabilization for rectangular T-S fuzzy discrete-time systems with time delay,IEEE Transactions on Systems Man and Cybernetics-Systems, 2019, 49(4):833-842.
[10]Jian Chen; Chong Lin; Bing Chen; Qing-Guo Wang; Improved stability criterion and output feedback control for discrete time-delay systems,Applied Mathematical Modelling, 2017, 52,82-93.
[11]Jian Chen;Chong Lin; Bing Chen; Qing-Guo Wang; Fuzzy-model-based admissibility analysis and output feedback control for nonlinear discrete-time systems with time-varying delay,Information Sciences2017, 412-413, 116-131.
[12]Jian Chen; Chong Lin; Bing Chen; Qing-Guo Wang; Mixed
 and passive control for singular systems with time delay via static output feedback,Applied Mathematics and Computation, 2017, 293, 244-253.
and passive control for singular systems with time delay via static output feedback,Applied Mathematics and Computation, 2017, 293, 244-253.
[13]Jian Chen;Chong Lin; Bing Chen; Qing-Guo Wang; Output feedback control for singular Markovian jump systems with uncertain transition rates,IET Control Theory & Applications, 2016, 10(16), 2142-2147.
[14]Jian Chen; Chong Lin; Bing Chen; An improved path-following method for solving static output feedback control problems,Optimal Control Applications & Methods,2016, 37, 1193-1206.
[15]吕霞;陈健(通讯作者);吕成兴;董颖慧;基于模糊逻辑的永磁同步电机自适应控制,控制工程, 2022.
[16]Jian Chen; Tao Zhang; Stability and output feedback control for singular Markovian jump delayed systems,Mathematical Control and Related Fields, 2018, 8(2), 475-490.
[17]Mingqi Xing,Yanqian Wang*, Qingle Pang, Guangming Zhuang, Dynamic-memory event-based asynchronous attack detection filtering for a class of nonlinear cyber-physical systems,IEEE Transactions on Cybernetics,录用。
[18]Yanqian Wang, Fu Chen, Guangming Zhuang, Dynamic event-based reliable dissipative asynchronous control for stochastic Markov jump systems with general conditional probabilities, Nonlinear Dynamics, 2020, 101(1), 465-485.
[19]Yanqian Wang, Fu Chen, Guangming Zhuang, Guang Yang, Dynamic event-based mixed H∞ and dissipative asynchronous control for Markov jump singularly perturbed systems, Applied Mathematics and Computation, 2020, 386: 125443.
[20]Yanqian Wang, Guangming Zhuang, Xia Chen, Zhen Wang, Fu Chen, Dynamic event-based finite-time mixed H∞ and passive asynchronous filtering for T-S fuzzy singular Markov jump systems with general transition rates, Nonlinear Analysis: Hybrid Systems, 2020, 36: 100874.
[21]Yanqian Wang,Guangming Zhuang, Fu Chen, A dynamic event-triggered H∞ control for singular Markov jump systems with redundant channels, International Journal of Systems Science, 2020, 51(1), 158-179.
[22]Yanqian Wang, Guangming Zhuang, Fu Chen, Event-based asynchronous dissipative filtering for T-S fuzzy singular Markovian jump systems with redundant channels, Nonlinear Analysis: Hybrid Systems, 2019, 34, 264-283.
[23]Yanqian Wang, Gongfei Song, Junjie Zhao, Jing Sun, Guangming Zhuang, Reliable mixed H∞ and passive control for networked control systems under adaptive event-triggered scheme with actuator faults and randomly occurring nonlinear perturbations, ISA Transactions, 2019, 89,45-57.
[24]Yanqian Wang, Qiaochu An, Ruihua Wang, Shuyu Zhang, Reliable control for event-triggered singular Markov jump systems with partly unknown transition probabilities and actuator faults, Journal of the Franklin Institute, 2019, 356, 1828-1855.
[25] Shuyu Zhang,Yanqian Wang, Guangming Zhuang, Gongfei Song, Dynamic event-based asynchronous and resilient dissipative filtering for T-S fuzzy Markov jump singularly perturbed systems against deception attacks, International Journal of Fuzzy Systems, 10.1007/s40815-021-01204-9.
[26] Mingqi Xing,Yanqian Wang, Guangming Zhuang, Fu Chen, Event-based asynchronous and resilient filtering for singular Markov jump LPV systems against deception attacks, Applied Mathematics and Computation, 2021, 403, 126176.
[27] Mingqi Xing,Yanqian Wang, Guangming Zhuang, Minsong Zhang, Dynamic event-based dissipative asynchronous control for T-S fuzzy singular Markov jump LPV systems against deception attacks, Nonlinear Dynamics, 2021, 103(2), 1709-1731.
[28]Yanqian Wang, Fu Chen, Guangming Zhuang, Gongfei Song, Event-based asynchronous and resilient filtering for Markov jump singularly perturbed systems against deception attacks, ISA Transactions, 2021, 112, 56-73.
[29] Mingqi Xing,Yanqian Wang, Guangming Zhuang, Fu Chen, Dynamic event-based dissipative asynchronous control for singular Markov jump LPV systems with general transition rates, IET Control Theory & Applications, 2021, 15(5): 635-651.
[30] Haotian Wang,Yanqian Wang, Guangming Zhuang, Asynchronous $H_{\infty}$ controller design for neutral singular Markov jump systems under dynamic event-triggered schemes, Journal of the Franklin Institute, 2021, 358(1), 494-515.
[31] Haotian Wang,Yanqian Wang, Guangming Zhuang, Junwei Lu, Asynchronous passive dynamic event-triggered controller design for singular Markov jump systems with general transition rates under stochastic cyber-attacks, IET Control Theory & Applications, 2020, 14(16), 2291-2302.
[32] Yihao Xu, Yanqian Wang, Guangming Zhuang, Junwei Lu, Reliable mixed H∞ passive control for T-S fuzzy semi-Markovian jump systems under different event-triggered schemes, IET Control Theory & Applications, 2020, 14(4), 594 -604.
[33]Yanqian Wang, Shuyu Zhang, Xiaobo Dong, Guangming Zhuang, Fault detection for a class of nonlinear networked systems under adaptive event-triggered scheme with randomly occurring nonlinear perturbations, International Journal of Systems Science, 2018, 49(9), 1918-1933.
[34] Yihao Xu,Yanqian Wang, Guangming Zhuang, Junwei Lu, Dynamic event-based asynchronous H∞ control for T-S fuzzy singular Markov jump systems with redundant channels, IET Control Theory & Applications, 2019, 13(14): 2239-2251.
[35] Yihao Xu,Yanqian Wang, Guangming Zhuang, Yuxin Wang, Junwei Lu, An event-triggered asynchronous H∞ filtering for singular Markov jump systems with redundant channels, Journal of the Franklin Institute, 2019, 356(16), 10076-10101.
[36]Jianhua Wang, Yanxi Yang. 3-D measurement method for nonuniform reflective objects. IEEE Transactions on Instrumentation and Measurement, 2021, DOI: 10.1109/TIM.2021.3116306.
[37]Jianhua Wang, Yanxi Yang. A New Three-Part Phase Unwrapping Algorithm for 3-D Measurement of Dynamic Objects. IEEE Photonics Technology Letters, 2021, 33(15): 749-752.
[38]Jianhua Wang, Yanxi Yang, Yuguo Zhou. Dynamic three-dimensional surface reconstruction approach for continuously deformed objects. IEEE Photonics Journal, 2021, 13(1):6800415.
[39]Jianhua Wang, Yanxi Yang, Yuguo Zhou. 3-D shape reconstruction of nonuniform refectance surface based on pixel intensity, pixel color and camera exposure time adaptive adjustment. Scientific Reports, 2021, 11: 4700.
[40]Jianhua Wang, Yanxi Yang, Mingwei Shao, Yuguo Zhou. Three-Dimensional Measurement for Rigid Moving Objects Based on Multi-Fringe Projection. IEEE Photonics Journal, 2020, 12(4): 6802114.
[41]Jianhua Wang, Yuguo Zhou, Yanxi Yang. 3-D measurement method for nonuniform reflective objects. IEEE Transactions on Instrumentation and Measurement, 2020, 69(11): 9132-9143.
[42]Jianhua Wang, Yuguo Zhou, Yanxi Yang. Three-dimensional shape detection for non uniform reflective objects: Combination of color light projection and camera’s exposure adjustment. IEEE Sensors Journal, 2020, 20(19): 11474-11483.
[43]Jianhua Wang, Yuguo Zhou, Yanxi Yang. Rapid 3D measurement technique for colorful objects employing RGB color light projection. Applied Optics,2020,59(7): 1907-1915.
[44]Jianhua Wang, Yuguo Zhou, Yanxi Yang. A novel and fast three-dimensional measurement technology for the objects surface with non-uniform reflection. Results in Physics,2020,16: 102878.
[45]Jianhua Wang. A novel 3D measurement technique for rigid moving objects with a determined movement trajectory and constant movement speed. AIP advances,2019, 9: 055227.
[46]Jianhua Wang, Yanxi Yang. Branch-cut algorithm with fast search ability for the shortest branch-cuts based on modified GA. Journal of Modern Optics, 2019, 66(5): 473-485.
[47]Jianhua Wang, Yanxi Yang. High-speed three-dimensional measurement technique for object surface with a large range of reflectivity variations. Applied Optics,2018,57(30): 9172-9182.
[48]Jianhua Wang, Yanxi Yang. An efficient phase error self-compensation algorithm for nonsinusoidal gating fringes in phase-shifting profilometry. Review of Scientific Instruments,2018,89(6): 063115.
[49]Jianhua Wang, Yanxi Yang. A wavelet ridge extraction method employing a novel cost function in two-dimensional wavelet transform profilometry. AIP advances,2018,8(5): 055020.
[50]Jianhua Wang, Yanxi Yang. Sign language learning based on high-speed fringe projection profilometry employing defocused binary fringe. Optoelectronics Letters. 2020,16(1): 65-74.
[51]王建华,杨延西.基于彩色编码光栅投影的双N步相移轮廓术.中国光学,2019.12(3):616-627.
[52]王建华,杨延西.基于改进价值函数和三维相位展开的动态三维测量方法研究.仪器仪表学报,2018,39(6): 241-251.
[53]王建华,杨延西,马晨.基于价值函数的二维小波变换小波脊提取算法.仪器仪表学报,2017,38(12):2915-2923.
[54] Qidan Zhu,Zhibo Yang. Intelligent power compensation system based on adaptive sliding mode control using soft computing and automation. COMPUTER SYSTEMS SCIENCE AND ENGINEERING. 2019.Vol.34 No 4.
[55] Zhu Qidan,Yang Zhibo. Dynamic recurrent fuzzy neural network-based adaptive sliding control for longitudinal automatic carrier landing system. Journal of Intelligent & Fuzzy Systems . 2019.37(1):53-62.
[56] Zhu Qidan,Yang Zhibo. Design of Air-wake Rejection Control for Longitudinal Automatic Carrier Landing Cyber-Physical System. Computers & Electrical Engineering. 2020.84: 106637.
[57]朱齐丹,杨智博,鲁鹏,马宇.基于动态递归神经网络的自动着舰系统设计.华中科技大学学报(自然科学版), 2019(9):36-41.
[58] Zhu Q,Yang Z, Lu P, et al. Nonlinear Model of the Carried-based UCAV in Final-Approach. Technical Committee on Control Theory, Chinese Association of Automation, 2018.
[59]C. Lv, H. Yu, Z. Hua, L. Li, and J. Chi, "Speed and Heading Control of an Unmanned Surface Vehicle Based on State Error PCH Principle," Mathematical Problems in Engineering, vol. 2018, pp. 1-9, 2018.