近日,我校信息与控制工程学院吕成兴副教授团队在智能农机自主作业智能控制领域取得重要进展,首次提出了一种事件触发扰动观测与非线性模型预测控制协同增强的轨迹跟踪新框架。相关成果以“Event triggered disturbance observer based nonlinear MPC for agricultural machinery trajectory tracking control”为题,发表在农业与计算机交叉领域国际权威期刊《Computers and Electronics in Agriculture》上。《Computers and Electronics in Agriculture》是中科院一区TOP期刊,最新影响因子8.3,是农业工程与农业信息化学科中公认的权威期刊,学术影响力顶尖。信息与控制工程学院吕成兴副教授为论文第一作者,硕士生薛冰川为论文第二作者和通信作者。该研究解决了复杂农田环境下农机高精度跟踪与车载计算资源受限之间的矛盾,为智慧农业装备的完全自主化作业提供了新的技术路径。
轨迹跟踪控制是实现农机在耕、种、管、收等环节自主作业的核心技术。然而,田间作业环境极其复杂,常面临泥泞松软土壤、不规则强风、雨雪雾天等外部扰动,以及机械磨损、重心偏移等引起的系统建模不确定性。如何在保障控制器抗扰能力的同时,大幅降低计算资源消耗,成为该领域长期悬而未决的瓶颈。
针对上述挑战,吕成兴副教授团队依托山东省重大创新工程项目“农业机械核心智能化技术研究与产业化”攻关,提出了“事件触发扰动观测器+非线性模型预测控制”的协同控制新策略。设计了融合强化学习神经网络的非线性扰动观测器,可在线精准估计并补偿模型不确定性与时变外部扰动,极大增强了系统在颠簸湿滑田地中的鲁棒性。在计算减负层面,巧妙地植入了事件触发机制,即在系统预测状态与实测状态的偏差突破阈值时激活核心的优化计算环节。这一举措打破了传统方法“每一拍都必须计算”的约束,从根源上释放了硬件资源。
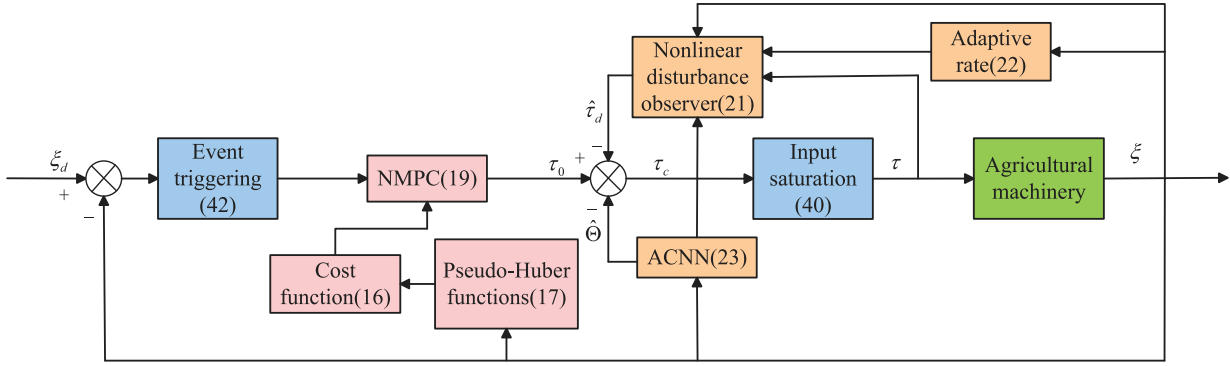
事件触发鲁棒非线性模型预测控制原理图
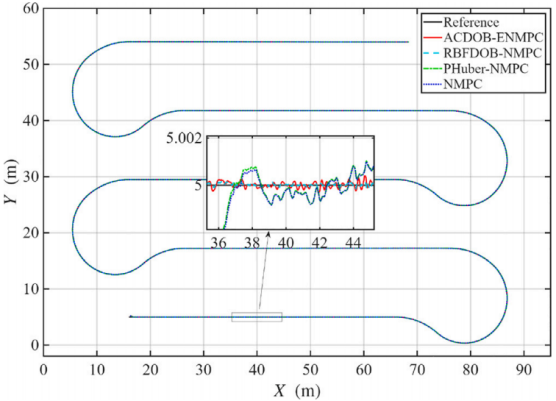
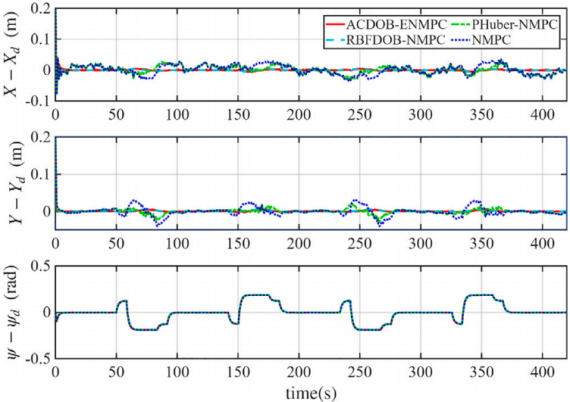
不同控制器的农业机械轨迹跟踪性能和轨迹跟踪误差
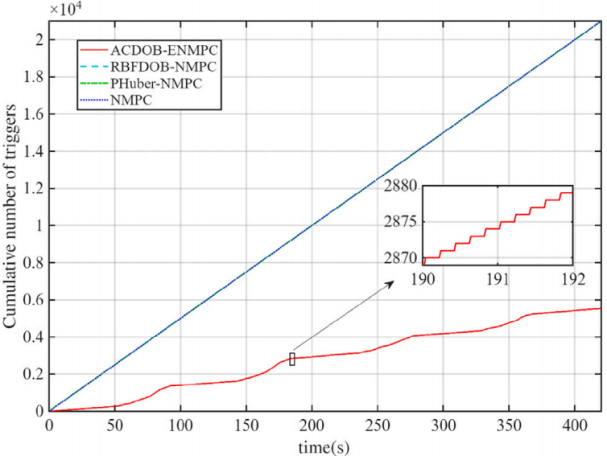
不同控制器优化求解次数的比较
结果显示,这套全新的控制框架展现出了优异的性能。与标准非线性模型预测控制算法相比,不仅轨迹跟踪精度提升了21.78%,更以仅需约三分之一的优化触发次数,实现了2.72倍的计算效率飞跃,为后续技术的产业化落地扫清了核心障碍。
本研究得到了山东省重大创新工程、山东省自然科学基金面上项目资助。(撰稿:吕成兴;审核:田艳兵、唐洪伟)
作者简介
吕成兴(第一作者),青岛理工大学信息与控制工程学院副教授,博士,硕士生导师。长期深耕智能无人系统运动控制、海洋环境监测仪器及工业物联网研究。近年来,主持山东省自然科学基金面上项目、山东省重点研发计划(重大科技创新工程)课题等省部级及横向课题多项,参与国家重点研发计划等多项省部级课题。以第一/通讯作者在国内外顶尖期刊发表SCI/EI论文40余篇,获授权发明专利20余项,其中第一发明人PCT专利1项。曾获山东省自动化学会教学成果二等奖等荣誉。
